
Wolfram SystemModeler是一款基于 Modelica 语言的工程开发平台,以及生命科学建模和仿真平台。它提供了互动的图形建模和仿真环境,以及一套自定义的组件库。同时它还是一款功能强大的系统模型仿真软件,它内置的可自定义图标列表为您的模型和库创建正确的外观,而且还支持所有FMI标准的导入和导出,允许您集成模型并与其他一百多种工具共同模拟。它的主界面 Model Center 是一个互动图形环境,包括一组自定义的组件库。在 Model Center 中开发的模型可以用于 Simulation Center 中进行仿真操作。该软件也提供了与 Mathematica 环境的无缝集成。因此,用户可以在Mathematica笔记本中同时使用两种软件来开发、仿真、文档化并且分析他们的 Wolfram SystemModeler 模型。它不仅可以数字方式而且可以符号方式进行计算,即具有任意精度。包括相关建模工具在内的众多库可简化这些多物理场仿真。通过集成或添加的库中的拖放组件来创建模型。这些库包含来自各种技术领域的组件,例如电气,机械,流体和化学应用,以及生物应用和能源管理。要模拟和试验模型,通常需要交互式地选择要可视化的变量或3D机械系统自动进行动画处理的变量。软件的适用范围非常的广泛,潜在的用户包括系统工程师,控制工程师,系统生物学家,研究人员,业余爱好者,教育者,学生以及许多其他人。足以证明这款软件的功能强大。而且小编给大家带来的是破解版,附带破解文件和详细的安装破解图文教程帮助大家完成破解,破解后所有功能全部免费无限制使用,有需要的朋友们不要错过了!
2、双击“SystemModeler_12.0.0_WIN.exe”开始安装软件;
3、进入安装向导,点击next;
4、选择安装路径,点击next;
5、创建开始菜单文件夹,点击next;
6、确认前面选择无误后点击install开始安装;
7、正在安装,请稍等片刻;
8、安装完成,点击finish退出向导;
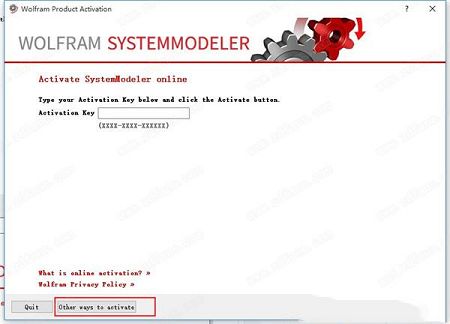
9、运行软件,如图所示,点击other ways to activate按钮;
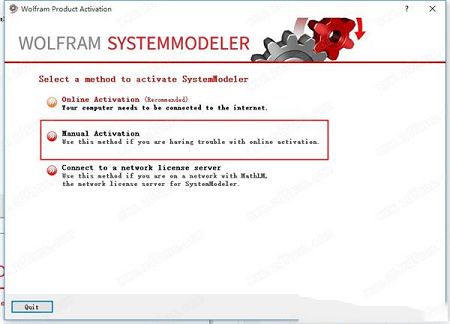
10、如图所示,点击手动激活选项;
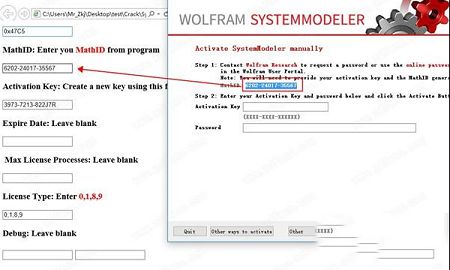
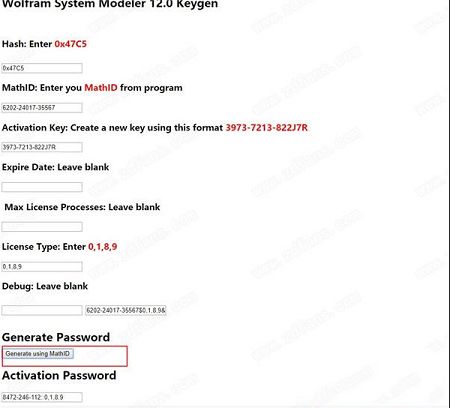
11、现在我们打开System Modeler 12.0 keygen.html网页,如图所示,有红字的项目,我们只需要将红字复制到输入框中即可;
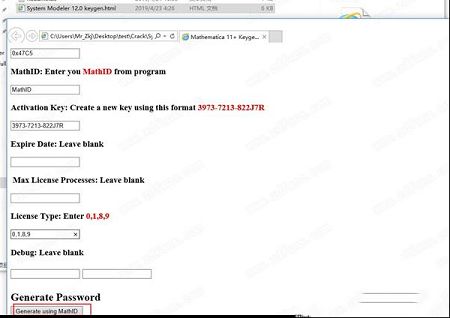
12、将软件中的MathID复制到对应的输入框中;
13、如图所示,点击页面下方的Generate using MathID,会生成password;
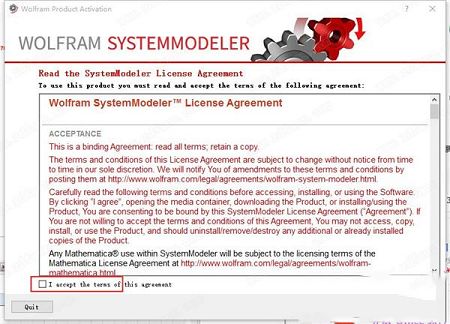
14、此时再选择i accept,然后点击OK即可;
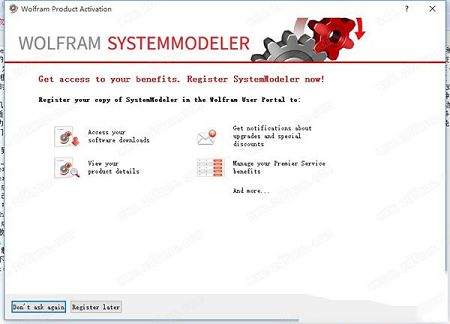
15、此时进入程序启动界面,选择你需要使用的功能;
16、进入软件我们可以看到,软件已经成功破解。
使用内置的可自定义图标列表为您的模型和库创建正确的外观。»
通过单击或使用逻辑表达式禁用或启用组件,调整模型复杂性,模拟故障模式并添加方案。»
设置模型的默认工作模式,直接跳转到文档,图表或模型代码。»
为您的域定义任何单位,并在模型和模拟中使用它们。»
易于阅读的模型代码,包括单行注释的换行和切换。»
改进了复杂连接的工作流程。
二、连接和部署
支持所有FMI标准的导入和导出,允许您集成模型并与其他一百多种工具共同模拟。»
从任何模型,模拟或参考页面直接跳转到模型分析。
三、模拟与分析
SystemModeler和Wolfram语言现在遵循相同的版本号。
通过更广泛的支持,更好的性能和更多的控制,极大地改进了符号线性化。»
复杂模型的简化模型初始化。
调试模型,了解模拟行为并使用公式浏览器查找性能瓶颈。
2、quation块浏览器,用于调试和理解模型
3、创建新模型时可供选择的默认图标的内置列表
4、通过右键单击或逻辑表达式轻松禁用和启用模型中的组件
5、能够选择打开模型时显示的视图(图表,图标,文本或文档)
6、能够添加自定义单位转换
7、Modelica文本视图的线性包装和单个注释的轻松切换
8、改进了连接线的路由和编辑、创建连接时,显示活动连接器
9、创建阵列连接时改进的工作流程。显着改善了显示和编辑图形视图的性能
10、能够轻松地将模型从SystemModeler复制到Wolfram语言桌面产品中
11、改进了Wolfram语言中的符号线性化。 版本号与Wolfram语言的同步
此示例显示如何在SystemModeler中逐步开发伺服机制模型。 它说明了多工程功能,并展示了如何使用Simulation Center分析在Model Center中创建的模型,合成控制器以及执行比较研究。
1、直流电机
受控直流电动机的简单动态模型包括可变电压源,电阻器,电感器和表示由DC电动机中的磁场提供的电能和机械能之间的耦合的电动势元件。 电机轴由旋转质量或惯性表示。
所有这些组件都可以在SystemModeler附带的Modelica标准库中找到。 在拖放的帮助下,它们可用于组成模型,如下图所示。
模型中心直流电机的图表视图。
要构建此模型,我们需要创建一个新模型,找到适当的组件,将组件拖放到图表区域,最后使用连接线工具连接组件。
我们首先创建一个名为DCMotor的新模型。我们将使用的组件都可以在Modelica标准库中找到。要找到组件,我们可以搜索它们,或者如果我们知道它们的确切位置,请在类浏览器中打开包含它们的包。我们将展示如何做到这两点。
要找到Step源组件,我们将使用类浏览器来搜索它。在类浏览器的文本框中键入步骤,并等待结果出现。
使用ModelCenter中的类浏览器搜索步骤源组件。
您应该在类浏览器中看到“步骤”的前10个匹配项。我们要使用的组件是Modelica.Blocks.Sources.Step组件
要将此组件添加到我们的DCMotor模型,请将其从类浏览器中拖放到类窗口的DiagramView中。
信号电压组件位于Modelica.Electrical.Analog.Sources包中。当我们知道组件的确切位置时,我们将使用类浏览器的树视图,并将树的分支一直展开到表示组件所在的包Sources的分支。
首先扩展Modelica包。这可以通过单击包图标和名称左侧的符号来完成。
在类浏览器中扩展Modelica包。
如您所见,Modelica包中包含多个包。 我们将继续扩展Electrical封装,然后是Analog封装,最后是Sources封装,我们将在其中找到信号电压元件。
扩展Modelica.Electrical.Analog.Sources包。
将SignalVoltage组件添加到DCMotor,方法是将其拖动到类窗口的Diagram View中。
我们现在已经添加了七个组件中的两个。 其余四个电气元件(电阻,电感,接地和EMF)均可在Modelica.Electrical.Analog.Basic软件包中找到。 由于我们已经扩展了Modelica.Electrical.Analog包,我们可以轻松找到Basic包并对其进行扩展以查找剩余的组件。
扩展Modelica.Electrical.Analog.Basic包。
将电气元件添加到DCMotor模型后,只剩下一个要添加的元件,即惯性。 它位于Modelica.Mechanics.Rotational.Components包中。 您可以通过展开Modelica,Mechanics,Rotational和Components包来选择是否要搜索它或直接浏览它。
添加惯性组件后,完成直流电机模型所需的全部工作就是连接组件。 使用连接线工具连接组件。
2、模型中心工具栏中的连接线工具。
例如,要将地线连接到信号电压分量的负极引脚,请将鼠标光标放在接地引脚上方,按住鼠标左键,然后按住鼠标光标,同时将鼠标光标移动到信号电压分量的负极引脚。 要建立连接,请释放鼠标按钮。
继续连接所有组件,直到DCMotor的Diagram View类似于本章的第一个图。
在删除和连接组件时,Model Center会生成与操作对应的Modelica代码。 切换到Modelica文本视图以查看模型的文本表示。 在模型的文本表示中,声明每个组件,并且两个组件之间的每个连接由方程式部分中的连接方程表示。
声明和等式的顺序取决于您删除组件和建立连接的顺序。 因此,声明和方程的顺序可能在您的模型中略有不同。 此外,为了便于阅读,所有图形注释都已从上面的DCMotor定义中删除。
DCMotor模型现已完成,可以进行模拟。 但是,首先,我们要指定某些模拟设置。 单击工具栏中“模拟类”按钮旁边的向下箭头,然后选择“实验设置”。 在弹出的“类属性”对话框中,通过编辑“停止时间”将模拟时间设置为25秒。 单击“确定”或按Enter键将设置应用于模型,并自动更新文本视图中的实验注释。 现在单击工具栏中的“模拟类”按钮以打开模拟中心并模拟模型。
将DCMotor模型的模拟时间设置为25秒。
在实验浏览器中选择要绘制的变量,如下图所示。
使用默认参数值绘制DCMotor模型的inertia1.w和signalVoltage1.v。
最后,我们得到结果,使用inertia1.w和signalVoltage1.v与时间的关系图。
更改参数值也很容易修改系统行为。 我们将改变电阻器的电阻,电感器的电感和惯性矩,以产生阻尼阶跃响应而不是振荡阶跃响应。
切换到实验浏览器中的“参数”视图。 要在“参数”视图中编辑参数值,请双击当前值。 将电阻1的电阻设置为10欧姆,电感1的电阻设置为0.1 H,惯性矩1设置为0.3 kgm。
再次模拟模型并研究惯性角速度的更新曲线。
使用自定义参数值绘制直流电机模型的惯性1.w和信号电压1.v。
二、刚性和弱轴
在本节中,我们将首先开发一个刚性轴模型,通过添加如下所示的阶跃扭矩来研究其阶跃响应,并通过在刚性轴模型中包含额外的弱点来展示如何更精确地建模轴。
我们首先开发刚性轴模型。 通过在类浏览器中扩展Modelica.Blocks.Sources,Modelica.Mechanics.Rotational.Sources和Modelica.Mechanics.Rotational.Components包,可以找到模型的组件(Step,Torque,Inertia和IdealGear), 或者只是搜索它们。 您可以为模型指定所需的任何名称。 该模型的不同阶段也可在IntroductoryExamples.MultiDomain包中找到。
IntroductoryExamples.MultiDomain.StiffAxis模型的Diagram View。
通过选择idealGear1组件,我们可以在位于编辑器底部的Parameters视图中编辑组件的参数。
在Model Center中编辑理想齿轮组件的传动比。
给比率参数赋值3.这意味着角度和角速度被放大三倍,并且扭矩从齿轮的一侧到另一侧衰减三倍。 另外,通过将参数startTime的值更改为1秒来更改步骤源的开始时间。
在模拟系统6秒后,我们观察到恒定的扭矩导致恒定的角加速度,即角速度的斜坡和轴的角度的方形曲线,如下所示。
绘制IntroductoryExamples.MultiDomain.StiffAxis模型的扭矩,惯性角速度2和惯性角2。
通过包括额外的弱点,可以更精确地建模轴。 根据下图,通过用由扭转弹簧连接的两个旋转质量组成的模型代替上述轴模型,可以实现这一点。 扭转弹簧可在Modelica.Mechanics.Rotational.Components包中找到。
IntroductoryExamples.MultiDomain.WeakAxis模型的Diagram View。
组件惯性1的力矩为1 kgm,而惯性2和惯性3的力矩为0.5 kgm。 spring1的弹簧常数设定为5 Nm / rad。 我们将模拟该子系统6秒并研究结果(见下文)。 请注意,惯性3,而不是之前的惯性2,是轴的最后一个元素,因此是选定的绘图变量。
绘制IntroductoryExamples.MultiDomain.WeakAxis模型的扭矩,惯性角3和惯性角速度3。
弱轴模型和刚性轴模型之间的比较表明它们表现相似,但前者具有增加的偏转。
行使
制作一个简单的直流电机,带有一个扭转弹簧,用于输出轴和另一个惯性元件。 模拟和研究结果。 调整一些参数并比较结果。 您可能还想添加输入扭矩并将其连接到惯性2,然后研究系统。
破解教程
1、在本站下载解压软件得到安装包以及注册机;2、双击“SystemModeler_12.0.0_WIN.exe”开始安装软件;
3、进入安装向导,点击next;
4、选择安装路径,点击next;
5、创建开始菜单文件夹,点击next;
6、确认前面选择无误后点击install开始安装;
7、正在安装,请稍等片刻;
8、安装完成,点击finish退出向导;
9、运行软件,如图所示,点击other ways to activate按钮;
10、如图所示,点击手动激活选项;
11、现在我们打开System Modeler 12.0 keygen.html网页,如图所示,有红字的项目,我们只需要将红字复制到输入框中即可;
12、将软件中的MathID复制到对应的输入框中;
13、如图所示,点击页面下方的Generate using MathID,会生成password;
14、此时再选择i accept,然后点击OK即可;
15、此时进入程序启动界面,选择你需要使用的功能;
16、进入软件我们可以看到,软件已经成功破解。
软件功能
一、模型开发使用内置的可自定义图标列表为您的模型和库创建正确的外观。»
通过单击或使用逻辑表达式禁用或启用组件,调整模型复杂性,模拟故障模式并添加方案。»
设置模型的默认工作模式,直接跳转到文档,图表或模型代码。»
为您的域定义任何单位,并在模型和模拟中使用它们。»
易于阅读的模型代码,包括单行注释的换行和切换。»
改进了复杂连接的工作流程。
二、连接和部署
支持所有FMI标准的导入和导出,允许您集成模型并与其他一百多种工具共同模拟。»
从任何模型,模拟或参考页面直接跳转到模型分析。
三、模拟与分析
SystemModeler和Wolfram语言现在遵循相同的版本号。
通过更广泛的支持,更好的性能和更多的控制,极大地改进了符号线性化。»
复杂模型的简化模型初始化。
调试模型,了解模拟行为并使用公式浏览器查找性能瓶颈。
软件特色
1、Wolfram SystemModeler支持FMI协同仿真导出和导入。显着改进的状态选择算法2、quation块浏览器,用于调试和理解模型
3、创建新模型时可供选择的默认图标的内置列表
4、通过右键单击或逻辑表达式轻松禁用和启用模型中的组件
5、能够选择打开模型时显示的视图(图表,图标,文本或文档)
6、能够添加自定义单位转换
7、Modelica文本视图的线性包装和单个注释的轻松切换
8、改进了连接线的路由和编辑、创建连接时,显示活动连接器
9、创建阵列连接时改进的工作流程。显着改善了显示和编辑图形视图的性能
10、能够轻松地将模型从SystemModeler复制到Wolfram语言桌面产品中
11、改进了Wolfram语言中的符号线性化。 版本号与Wolfram语言的同步
使用说明
一、多域-A伺服机制此示例显示如何在SystemModeler中逐步开发伺服机制模型。 它说明了多工程功能,并展示了如何使用Simulation Center分析在Model Center中创建的模型,合成控制器以及执行比较研究。
1、直流电机
受控直流电动机的简单动态模型包括可变电压源,电阻器,电感器和表示由DC电动机中的磁场提供的电能和机械能之间的耦合的电动势元件。 电机轴由旋转质量或惯性表示。
所有这些组件都可以在SystemModeler附带的Modelica标准库中找到。 在拖放的帮助下,它们可用于组成模型,如下图所示。
模型中心直流电机的图表视图。
要构建此模型,我们需要创建一个新模型,找到适当的组件,将组件拖放到图表区域,最后使用连接线工具连接组件。
我们首先创建一个名为DCMotor的新模型。我们将使用的组件都可以在Modelica标准库中找到。要找到组件,我们可以搜索它们,或者如果我们知道它们的确切位置,请在类浏览器中打开包含它们的包。我们将展示如何做到这两点。
要找到Step源组件,我们将使用类浏览器来搜索它。在类浏览器的文本框中键入步骤,并等待结果出现。
使用ModelCenter中的类浏览器搜索步骤源组件。
您应该在类浏览器中看到“步骤”的前10个匹配项。我们要使用的组件是Modelica.Blocks.Sources.Step组件
要将此组件添加到我们的DCMotor模型,请将其从类浏览器中拖放到类窗口的DiagramView中。
信号电压组件位于Modelica.Electrical.Analog.Sources包中。当我们知道组件的确切位置时,我们将使用类浏览器的树视图,并将树的分支一直展开到表示组件所在的包Sources的分支。
首先扩展Modelica包。这可以通过单击包图标和名称左侧的符号来完成。
在类浏览器中扩展Modelica包。
如您所见,Modelica包中包含多个包。 我们将继续扩展Electrical封装,然后是Analog封装,最后是Sources封装,我们将在其中找到信号电压元件。
扩展Modelica.Electrical.Analog.Sources包。
将SignalVoltage组件添加到DCMotor,方法是将其拖动到类窗口的Diagram View中。
我们现在已经添加了七个组件中的两个。 其余四个电气元件(电阻,电感,接地和EMF)均可在Modelica.Electrical.Analog.Basic软件包中找到。 由于我们已经扩展了Modelica.Electrical.Analog包,我们可以轻松找到Basic包并对其进行扩展以查找剩余的组件。
扩展Modelica.Electrical.Analog.Basic包。
将电气元件添加到DCMotor模型后,只剩下一个要添加的元件,即惯性。 它位于Modelica.Mechanics.Rotational.Components包中。 您可以通过展开Modelica,Mechanics,Rotational和Components包来选择是否要搜索它或直接浏览它。
添加惯性组件后,完成直流电机模型所需的全部工作就是连接组件。 使用连接线工具连接组件。
2、模型中心工具栏中的连接线工具。
例如,要将地线连接到信号电压分量的负极引脚,请将鼠标光标放在接地引脚上方,按住鼠标左键,然后按住鼠标光标,同时将鼠标光标移动到信号电压分量的负极引脚。 要建立连接,请释放鼠标按钮。
继续连接所有组件,直到DCMotor的Diagram View类似于本章的第一个图。
在删除和连接组件时,Model Center会生成与操作对应的Modelica代码。 切换到Modelica文本视图以查看模型的文本表示。 在模型的文本表示中,声明每个组件,并且两个组件之间的每个连接由方程式部分中的连接方程表示。
声明和等式的顺序取决于您删除组件和建立连接的顺序。 因此,声明和方程的顺序可能在您的模型中略有不同。 此外,为了便于阅读,所有图形注释都已从上面的DCMotor定义中删除。
DCMotor模型现已完成,可以进行模拟。 但是,首先,我们要指定某些模拟设置。 单击工具栏中“模拟类”按钮旁边的向下箭头,然后选择“实验设置”。 在弹出的“类属性”对话框中,通过编辑“停止时间”将模拟时间设置为25秒。 单击“确定”或按Enter键将设置应用于模型,并自动更新文本视图中的实验注释。 现在单击工具栏中的“模拟类”按钮以打开模拟中心并模拟模型。
将DCMotor模型的模拟时间设置为25秒。
在实验浏览器中选择要绘制的变量,如下图所示。
使用默认参数值绘制DCMotor模型的inertia1.w和signalVoltage1.v。
最后,我们得到结果,使用inertia1.w和signalVoltage1.v与时间的关系图。
更改参数值也很容易修改系统行为。 我们将改变电阻器的电阻,电感器的电感和惯性矩,以产生阻尼阶跃响应而不是振荡阶跃响应。
切换到实验浏览器中的“参数”视图。 要在“参数”视图中编辑参数值,请双击当前值。 将电阻1的电阻设置为10欧姆,电感1的电阻设置为0.1 H,惯性矩1设置为0.3 kgm。
再次模拟模型并研究惯性角速度的更新曲线。
使用自定义参数值绘制直流电机模型的惯性1.w和信号电压1.v。
二、刚性和弱轴
在本节中,我们将首先开发一个刚性轴模型,通过添加如下所示的阶跃扭矩来研究其阶跃响应,并通过在刚性轴模型中包含额外的弱点来展示如何更精确地建模轴。
我们首先开发刚性轴模型。 通过在类浏览器中扩展Modelica.Blocks.Sources,Modelica.Mechanics.Rotational.Sources和Modelica.Mechanics.Rotational.Components包,可以找到模型的组件(Step,Torque,Inertia和IdealGear), 或者只是搜索它们。 您可以为模型指定所需的任何名称。 该模型的不同阶段也可在IntroductoryExamples.MultiDomain包中找到。
IntroductoryExamples.MultiDomain.StiffAxis模型的Diagram View。
通过选择idealGear1组件,我们可以在位于编辑器底部的Parameters视图中编辑组件的参数。
在Model Center中编辑理想齿轮组件的传动比。
给比率参数赋值3.这意味着角度和角速度被放大三倍,并且扭矩从齿轮的一侧到另一侧衰减三倍。 另外,通过将参数startTime的值更改为1秒来更改步骤源的开始时间。
在模拟系统6秒后,我们观察到恒定的扭矩导致恒定的角加速度,即角速度的斜坡和轴的角度的方形曲线,如下所示。
绘制IntroductoryExamples.MultiDomain.StiffAxis模型的扭矩,惯性角速度2和惯性角2。
通过包括额外的弱点,可以更精确地建模轴。 根据下图,通过用由扭转弹簧连接的两个旋转质量组成的模型代替上述轴模型,可以实现这一点。 扭转弹簧可在Modelica.Mechanics.Rotational.Components包中找到。
IntroductoryExamples.MultiDomain.WeakAxis模型的Diagram View。
组件惯性1的力矩为1 kgm,而惯性2和惯性3的力矩为0.5 kgm。 spring1的弹簧常数设定为5 Nm / rad。 我们将模拟该子系统6秒并研究结果(见下文)。 请注意,惯性3,而不是之前的惯性2,是轴的最后一个元素,因此是选定的绘图变量。
绘制IntroductoryExamples.MultiDomain.WeakAxis模型的扭矩,惯性角3和惯性角速度3。
弱轴模型和刚性轴模型之间的比较表明它们表现相似,但前者具有增加的偏转。
行使
制作一个简单的直流电机,带有一个扭转弹簧,用于输出轴和另一个惯性元件。 模拟和研究结果。 调整一些参数并比较结果。 您可能还想添加输入扭矩并将其连接到惯性2,然后研究系统。
∨ 展开
 守卫剑阁时空之轮v2.22正式版
守卫剑阁时空之轮v2.22正式版
 探踪脑力图 V1.1.4.3707 官方版
探踪脑力图 V1.1.4.3707 官方版
 Infinite Color Panelv1.0汉化版(附使用教程)
Infinite Color Panelv1.0汉化版(附使用教程)
 浮云破灭v3.8正式版
浮云破灭v3.8正式版
 KB2884256补丁 Win7 32位/64位 官方最新版
KB2884256补丁 Win7 32位/64位 官方最新版
 宇轩一键排版精灵v1.2绿色免费版
宇轩一键排版精灵v1.2绿色免费版
 Oopz语音 V1.1.5.1 官方版
Oopz语音 V1.1.5.1 官方版
 FFQueuev1.7.52.259绿色汉化版
FFQueuev1.7.52.259绿色汉化版
 天正结构T20V9.0破解版 V2023 永久激活码版
天正结构T20V9.0破解版 V2023 永久激活码版
 测量员v11.8.11电脑版
测量员v11.8.11电脑版
 Terrasolid 2021v2021.0中破解版
Terrasolid 2021v2021.0中破解版
 广联达计价软件GBQ4.0破解版
广联达计价软件GBQ4.0破解版
 隧道施工计算软件芝麻开门v1.1.1绿色版
隧道施工计算软件芝麻开门v1.1.1绿色版
 飞时达土石方算量软件v14.0和谐版(附安装教程+注册机)
飞时达土石方算量软件v14.0和谐版(附安装教程+注册机)
 建标库v8.6.2.6官方版
建标库v8.6.2.6官方版